初中物理学中把一根在力的作用下可绕固定点转动的硬棒叫做杠杆。杠杆可以是任意形状的硬棒。下面就是课件网小编给大家带来的中考物理杠杆问题解析,希望大家喜欢!
常考类型一:根据杠杆平衡条件进行力与力臂的求解
(1)利用F1l1=F2l2进行有关计算。先根据杠杆转动的情况,找出动力和阻力。
(2)再根据支点的位置,确定每个力的力臂。
(3)最后根据杠杆的平衡条件,代入数据计算出结果。
例3:(2015年 黑龙江省龙东地区)如图4所示的杠杆(自重和摩擦不计),O为支点,A处挂一重为100 N的物体,为保证杠杆在水平方向平衡,在中点B处沿
(填F或F1或F2)方向施加一个最小的力为 N。
解析:如图4,要使拉力最小,动力臂要最长,拉力的方向应垂直于杠杆向上,即竖直向上(沿F2方向),动力臂为OB最长,且OA=2OB。杠杆在水平位置平衡,根据杠杆平衡条件有:F2×OB=G×OA,F2=G×=100 N×2=200 N。
答案:F2;200。
点拨:杠杆平衡动力最小问题中阻力乘以阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做到:①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。
常考类型二:判断是省力杠杆还是费力杠杆
杠杆的选择要根据实际情况。需要较大的力才能解决问题时,应选择省力杠杆;为了使用方便,想省距离时,应选费力杠杆。三种杠杆的判定依据是杠杆的平衡条件,即F1l1=F2l2。若l1>l2,则F1 例1:(2014年 黑龙江省牡丹江市)使用杠杆为我们的生活带来方便,下列杠杆的使用能够省距离的是( )。
解析:结合图片和生活经验来判断杠杆在使用过程中动力臂和阻力臂的大小关系,根据杠杆平衡方程确定动力和阻力的大小关系,这样就可顺利判断它是属于哪种类型的杠杆。省力的费距离,费力的省距离。A、C、D三种杠杆均是动力臂大于阻力臂,所以它们都是省力杠杆。只有B给出的杠杆符合条件。
答案:B。
常考类型三:确认并画出杠杆的力臂
学习杠杆的关键点是知道杠杆的五要素,即支点、动力、动力臂、阻力和阻力臂。组成杠杆的示意图见图1。
(1)支点用字母O表示,是杠杆绕着转动的点,同一根杠杆使用方法不同,支点的位置可能就不同,要根据具体情况区分支点。
(2)画动力(用字母F1表示)或阻力(用字母F2表示)时应注意力的作用点和方向。动力和阻力都是杠杆受到的力,其作用点都在杠杆上。有的同学认为同一根杠杆上动力和阻力的方向一定相同,有的同学认为一定不同,这都是错误的。正确的认识是:动力和阻力能使杠杆转动的方向一定是相反的。即,一个力能使杠杆向顺时针方向转动,则另一个力一定能使杠杆向逆时针方向转动。
(3)动力臂用l1表示,阻力臂用l2表示。力臂不是支点到力的作用点的距离,而是支点到力的作用线的距离。借用几何用语,力臂不是点到点的距离,而是点到直线的距离。
(4)画力臂的方法:一找支点,二画线,三连距离,四标签。即,找支点O,画力的作用线(虚线),画力臂(虚线,过支点向力的作用线作垂线),标力臂(大括号)。
例2:(2013年 黑龙江省大庆市)试画出力F1、F2的力臂。(图2)
解析:本题考查杠杆五要素中动力臂和阻力臂的画法。画力臂时必须注意力臂是“支点到力的作用线的距离”,而不是“支点到力的作用点的距离”。力的作用线是通过力的作用点并沿力的方向所画的直线。
答案:从支点向F1、F2的作用线引垂线,垂线段的长度即为力臂l1、l2,如图3所示。
点拨:画力臂可以按“找点、画线、作垂线、标符号”这样的步骤完成。“找点”──找支点。由题意知,杠杆的支点是O。“画线”──画出力的作用线。将F1、F2分别向两端延长,变为一条直线,这就是力的作用线。“作垂线”──从支点O向力的作用线画垂线,支点到垂足的距离就是力臂。“标符号”──把支点到垂足的距离用大括号或带箭头的线段标出,在旁边标上l1、l2。
常考类型四:有关杠杆平衡条件的探究实验题
解决杠杆平衡条件的探究问题的基本要领是:
(1)知道杠杆平衡是指杠杆静止或匀速转动。实验前应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是方便从杠杆上量出力臂。
(2)实验结论:杠杆的平衡条件是动力乘以动力臂等于阻力乘以阻力臂,写成公式为F1l1=F2l2。
(3)还可以利用动力乘以动力臂是否等于阻力乘以阻力臂来判断杠杆平衡与否。
例4:(2015年 黑龙江省齐齐哈尔市)在探究杠杆平衡条件的实验中
(1)杠杆的平衡状态是指杠杆处于 或匀速转动状态。实验前没有挂钩码时,调节平衡螺母,使杠杆在水平位置平衡,其主要目的是 。
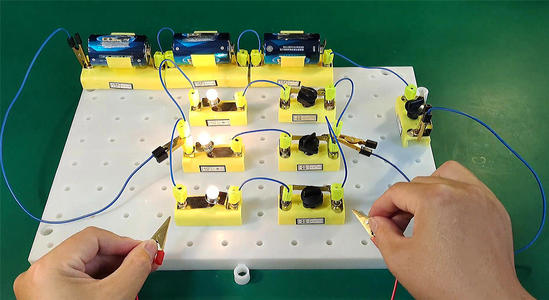
(2)实验中,用装置A的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师建议同学不宜采用这种方式,该种方式的不足主要是因为( )。
A. 一个人无法独立操作
B. 力臂与杠杆不重合
C. 力和力臂数目过多,不易得出结论
D. 杠杆受力不平衡
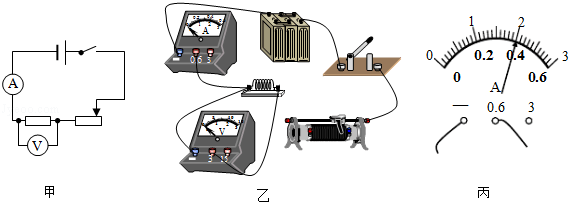
(3)若用装置B进行实验,则此时弹簧测力计的示数是 N;将弹簧测力计沿虚线方向拉,仍然使杠杆在原来的位置平衡,此时拉力的力臂将 ,弹簧测力计的示数将 (均选填“变大”“变小”或“不变”)。
解析:(1)杠杆平衡是指杠杆静止或匀速转动。实验前没有挂钩码时,调节平衡螺母,使杠杆在水平位置平衡,其主要目的是便于测量力臂和避免杠杆自重对实验的影响。(2)装置A中力和力臂数目过多,计算麻烦,不易得出结论。(3)将弹簧测力计沿虚线方向拉,仍然使杠杆在原来的位置平衡,支点到力臂的距离小了,也就是拉力的力臂将变小,根据杠杆平衡条件知道弹簧测力计的示数将变大。
答案:(1)静止状态;便于测量力臂和避免杠杆自重对实验的影响(只答便于测量力臂也给分)。(2)C。(3)1.8;变小;变大。